
미시간 사이언티픽 코퍼레이션의 휠 펄스 변환기(WPT) 차량의 바퀴에 부착하도록 설계된 소형 인코더 시스템입니다. WPT의 인코더 신호를 사용하여 계산할 수 있습니다. 회전 속도, 각도 위치 및 바퀴의 회전 방향. 이러한 측정은 일반적으로 전기 자동차 개발 및 자율 차량 추적과 같은 애플리케이션을 위해 차량의 위치를 추적하는 데 사용됩니다.
자율 차량 추적
자율 주행 차량은 GNSS(Global Navigation Satellite System) 기술에 의존하여 위치를 추적하지만 이러한 시스템은 도시, 실내 또는 지하 환경에서 실패할 수 있습니다. GNSS 추적을 사용할 수 없는 지역에서는 휠 펄스 변환기 또는 가속도계와 같은 다른 기술을 사용하여 차량의 위치를 추적해야 합니다. WPT 시스템은 창고 내부의 자율 지게차 또는 자율 지하 광산 장비의 위치를 추적하는 데 사용할 수 있습니다. 또한 WPT 시스템을 사용하여 가속도계 기반 시스템의 정확도를 테스트하고 검증할 수 있습니다.
WPT 센서 설명
어셈블리는 다음과 같이 설계되었습니다. 차량 바퀴에 빠르고 쉽게 장착하십시오. 작고 가벼운 디자인은 견고한 하우징에 전자 장치로 구성되어 있습니다. WPT는 다음을 통해 휠에 장착됩니다. 빠른 연결 러그 너트 콜릿 또는 확장 러그 너트. 어댑터 플레이트와 빠른 연결 러그 너트 콜릿은 표준 휠 치수를 충족할 수 있도록 다양한 크기와 구성으로 제공됩니다. ㅏ 자기 차량 고정자 구속 및 구속 로드는 센서가 차량에서 사용되는 동안 인코더 모듈 고정자를 제자리에 유지하는 데 사용됩니다. 차량 테스트의 특성상 WPT는 매우 견고하게 설계되었습니다. IP67 등급의 로터리 씰이 있는 WPT는 비가 오거나 눈이 오거나 더러운 환경에서 테스트하는 데 이상적입니다.
차량 바퀴에 빠르고 쉽게 장착하십시오. 작고 가벼운 디자인은 견고한 하우징에 전자 장치로 구성되어 있습니다. WPT는 다음을 통해 휠에 장착됩니다. 빠른 연결 러그 너트 콜릿 또는 확장 러그 너트. 어댑터 플레이트와 빠른 연결 러그 너트 콜릿은 표준 휠 치수를 충족할 수 있도록 다양한 크기와 구성으로 제공됩니다. ㅏ 자기 차량 고정자 구속 및 구속 로드는 센서가 차량에서 사용되는 동안 인코더 모듈 고정자를 제자리에 유지하는 데 사용됩니다. 차량 테스트의 특성상 WPT는 매우 견고하게 설계되었습니다. IP67 등급의 로터리 씰이 있는 WPT는 비가 오거나 눈이 오거나 더러운 환경에서 테스트하는 데 이상적입니다.
인코더 신호 조절기
WPT 광학 인코더 분해능은 회전당 최대 5,000펄스(ppr)를 사용할 수 있습니다. 표준 해상도에는 360ppr, 512ppr, 1024ppr 및 5,000ppr이 포함됩니다. 요청 시 추가 해상도를 사용할 수 있습니다. 모든 인코더 선택에는 A, B, I 및 A⊕B의 90가지 표준 인코더 출력이 있습니다. 출력 A와 B는 직각 위상에 있습니다. 즉, 위상이 0도 다릅니다. 출력 A⊕B는 두 채널의 배타적 논리합으로 인코더의 표준 분해능을 두 배로 늘립니다. 5 ~ XNUMX 디지털 볼트 펄스의 출력은 TTL 부하를 구동할 수 있습니다.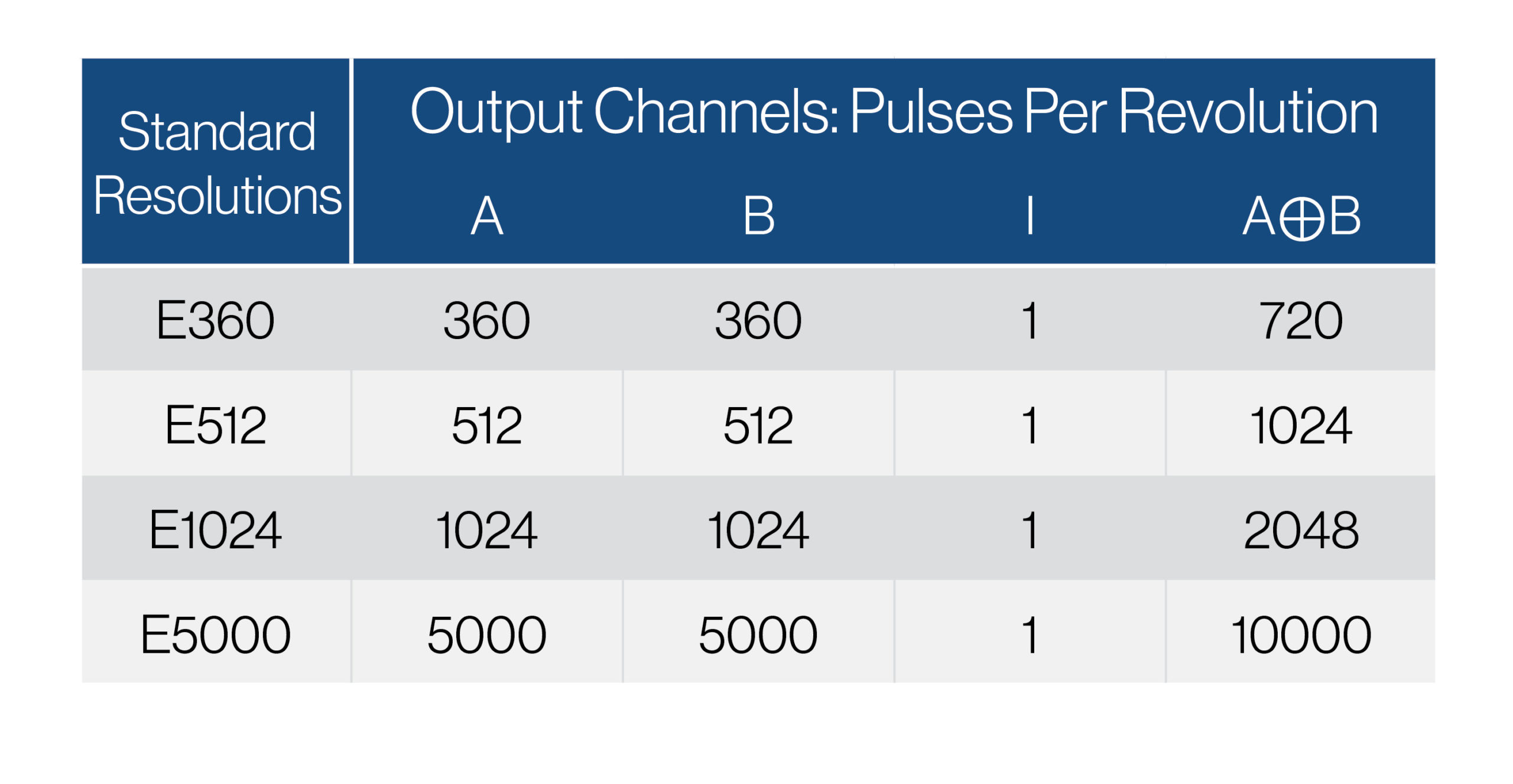
미시간 사이언티픽 EC-LV 인코더 신호 조절기 WPT 센서 인코더의 0 ~ 5 디지털 볼트 펄스를 각 위치 및 각속도에 비례하는 선형 전압으로 변환합니다. EC-LV는 고정자 케이블과 인라인으로 추가할 수 있으며 추가 프로그래밍이 필요하지 않습니다. 외부 스위치를 통해 사용자는 속도 범위와 회전 방향을 선택할 수 있습니다.
귀하의 애플리케이션에 휠 펄스 변환기를 사용하는 방법에 대해 자세히 알아보려면 다음을 참조하십시오. Michigan Scientific 담당자에게 문의 .