
SR/ERT 시리즈 회전축 끝에 장착된 회전 센서가 있는 슬립 링 어셈블리. 금 합금 슬립 링은 회전 기계에 설치된 스트레인 게이지, 열전대 또는 기타 센서에 고품질 전기 연결을 만드는 데 사용됩니다. 전류 용량은 연결당 0.5A이고 최대 피크 저항 변동은 0.1옴입니다. 회전 센서는 회전 속도, 각도 위치 및 회전 방향을 측정하는 데 사용됩니다. 회전 센서는 슬립 링 연결을 사용하지 않습니다. 모든 모델은 표준 슬립 링 어셈블리로 사용할 수 있는 인코더 전자 장치 없이 사용할 수 있습니다.
특징
- 10, 20 또는 36 슬립 링 연결
- 인코더 또는 리졸버 회전 센서
- 추가 인코더 전자 장치(내장)
- 내후성 씰의 유무에 관계없이 사용 가능
- 다양한 로터 스타일
- 원형 커넥터 또는 색상으로 구분된 납땜 단자
- 계측 품질의 링 및 브러시
- 밀폐형 부식 방지 금속 하우징
- 경량 컴팩트
- 인코더 없이 사용 가능
상품 설명
ERT 슬립 링 어셈블리의 하우징은 슬립 링의 수에 따라 15~XNUMX인치 길이입니다. 무게는 약 XNUMX온스입니다. 로터는 고강도 스테인리스 스틸로 만들어집니다. 고정자는 가볍고 니켈 도금된 알루미늄입니다. 회전 방지 장치를 부착하기 위한 나사 구멍이 제공됩니다. 연결 정보는 하우징에 영구적으로 새겨져 있습니다. 원형 커넥터 또는 납땜 단자는 배선 종단으로 제공됩니다. 원형 커넥터는 일반적으로 고정자에 지정됩니다. 로터에서 빠른 분리가 필요한 테스트 애플리케이션은 원형 커넥터를 지정합니다. 공간이 제한된 경우 로터에 납땜 단자가 지정됩니다. 두 경우 모두 방향 선택도 있습니다.
이 시리즈의 모든 하우징은 접촉식 회전 씰을 수용하도록 설계되었습니다. 이 씰(W 선택)과 함께 주문한 장치는 완전히 내후성이 있으며 완전히 잠긴 날을 견딜 수 있습니다. 씰은 작동을 최대 2000rpm으로 제한합니다. 자동차 바퀴와 같은 대부분의 습한 날씨 애플리케이션이 이 범위 내에 있습니다. 건조한 조건에서 더 빠른 속도를 위해서는 접촉식 로터리 씰이 없는 장치를 주문하십시오. 씰이 없는 장치는 다음 속도가 가능합니다.
- 10개의 링 – 10,000rpm
- 20개의 링 – 4,000rpm
- 36개의 링 – 2,400rpm
씰이 있는 단위 토크는 21인치-온스입니다. 씰이 없는 단위 토크는 512인치-온스입니다. 응용 분야에 고속, 비바람에 견디는 슬립 링 및 인코더가 필요한 경우 SR/EXNUMX 시리즈에서 비접촉 미로 씰이 있는 장치를 고려하십시오.
서류
테크 노트
동영상
옵션
회전 센서 선택 E256, E360, E500 및 E512:
90가지 광학 인코더 분해능이 제공됩니다(아래 표 참조). 이러한 인코더 선택에는 각각 아래 그래픽으로 표시된 0개의 출력이 있습니다. 출력 A와 B는 직각 위상에 있습니다. 즉, 위상이 5° 다릅니다. 출력 I는 인덱스 펄스입니다. 출력 A+B는 A와 B의 배타적 논리합으로 인코더의 기본 분해능을 두 배로 늘립니다. XNUMX~XNUMX볼트 펄스의 출력은 TTL 부하를 구동할 수 있습니다. 인코더에는 충격과 진동을 견디도록 설계된 금속 코드 휠과 견고한 전자 장치가 있습니다.

인코더 장치에 추가 인코더 전자 장치를 내장할 수 있습니다. 이러한 전자 장치는 회전 속도계 또는 리졸버 출력을 제공할 수 있습니다.
회전 속도계 옵션은 샤프트 속도에 비례하는 전압과 샤프트의 각도 위치에 비례하는 전압을 제공합니다. 각도 위치 출력의 전체 스케일은 최대 +10 Vdc까지 공장에서 구성할 수 있습니다. 속도 출력의 전체 스케일은 최대 ±10 Vdc까지 공장에서 구성할 수 있습니다.
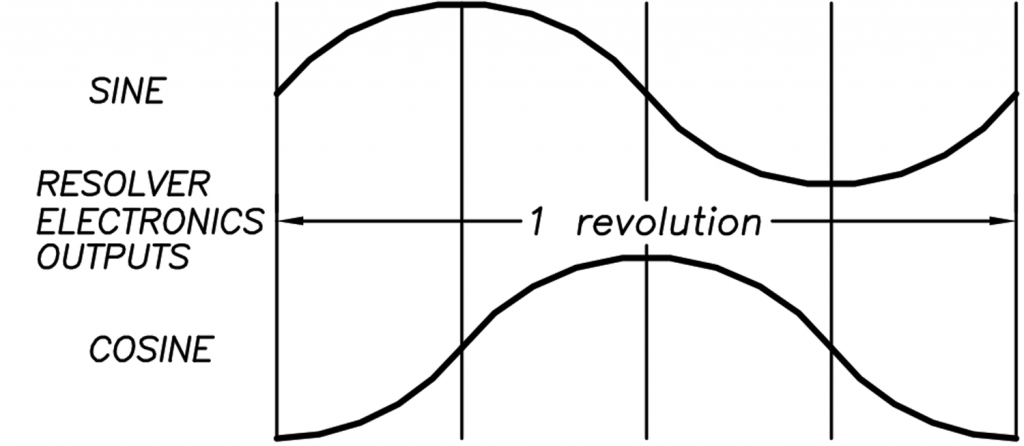
리졸버 옵션은 서로 90도 위상차가 있는 사인 및 코사인 아날로그 출력을 모두 제공합니다. 전체 범위 출력은 최대 ±10Vdc까지 공장에서 구성할 수 있습니다.

ERT 모델
10 슬립 링
인코더(E)



해결사(R)



타코미터(T)

인코더
비바람에 견디는 하우징
유형 A(2.500" 직경) 로터
Bendix PT 고정자 및 회전자 커넥터
내장형 인코더(타코미터) 전자 장치

인코더
비바람에 견디는 하우징
유형 A(2.500" 직경) 로터
Bendix PT 고정자 및 회전자 커넥터
내장형 인코더(타코미터) 전자 장치

인코더
비바람에 견디는 하우징
유형 M(2.00" 직경) 로터
Bendix PT 고정자 커넥터
로터 터미널
내장형 인코더(타코미터) 전자 장치
인코더 없음

20 슬립 링
인코더(E)


인코더
비바람에 견디는 하우징
유형 A(2.500" 직경) 로터
Bendix PT 고정자 및 회전자 커넥터
대체 고정자 커넥터 위치





해결사(R)






타코미터(T)

비바람에 견디는 하우징
유형 A(2.500" 직경) 로터
Bendix PT 고정자 및 회전자 커넥터
내장형 인코더(타코미터) 전자 장치

비바람에 견디는 하우징
터미널이 있는 유형 A(2.500" 직경) 로터
Bendix PT 고정자 커넥터
내장형 인코더(타코미터) 전자 장치

비바람에 견디는 하우징
터미널이 있는 유형 M(2.000" 직경) 로터
Bendix PT 고정자 커넥터
내장형 인코더(타코미터) 전자 장치

비바람에 견디는 하우징
터미널이 있는 유형 M(2.000" 직경) 로터
Bendix PT 고정자 커넥터
내장형 인코더(타코미터) 전자 장치
인코더 없음

36 슬립 링
인코더(E)


해결사(R)


타코미터(T)

인코더 없음

최근 수정 된 항목 :